Differentiable rendering is a key ingredient for inverse rendering and machine learning,
as it allows to optimize scene parameters (shape, materials, lighting) to best fit target images.
Differentiable rendering requires that each scene parameter relates to pixel values through differentiable operations.
While 3D mesh rendering algorithms have been implemented in a differentiable way, these algorithms do not directly extend
to Constructive-Solid-Geometry~(CSG), a popular parametric representation of shapes, because the underlying
boolean operations are typically performed with complex black-box mesh-processing libraries.
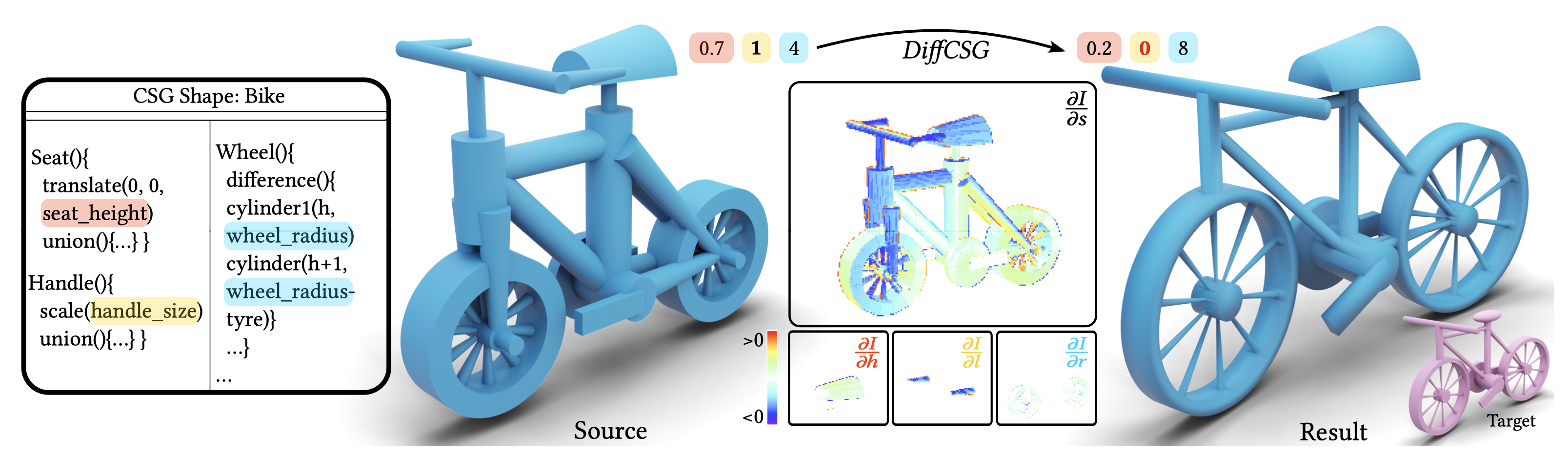
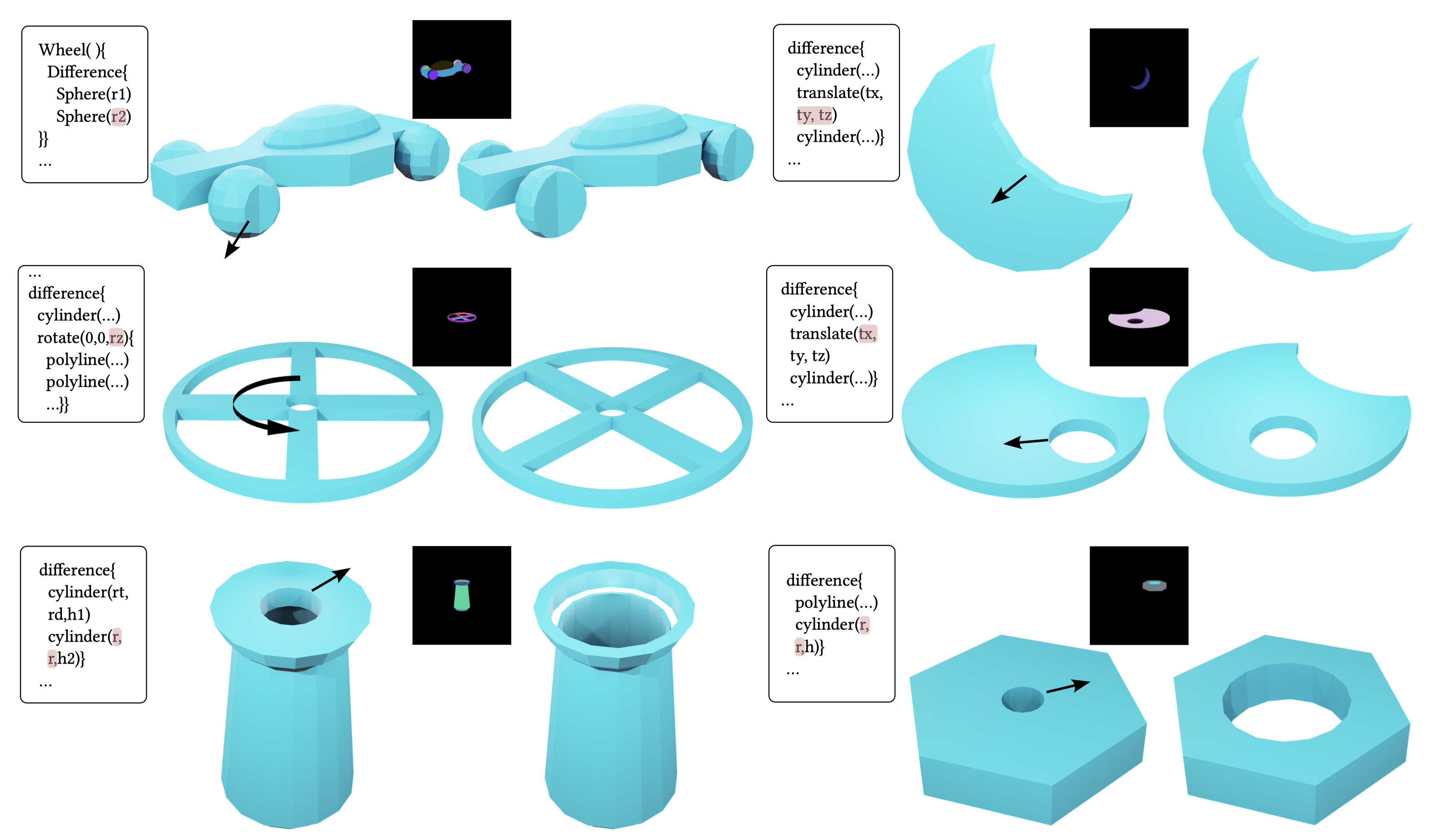
We present an algorithm, DiffCSG, to render CSG models in a differentiable manner.
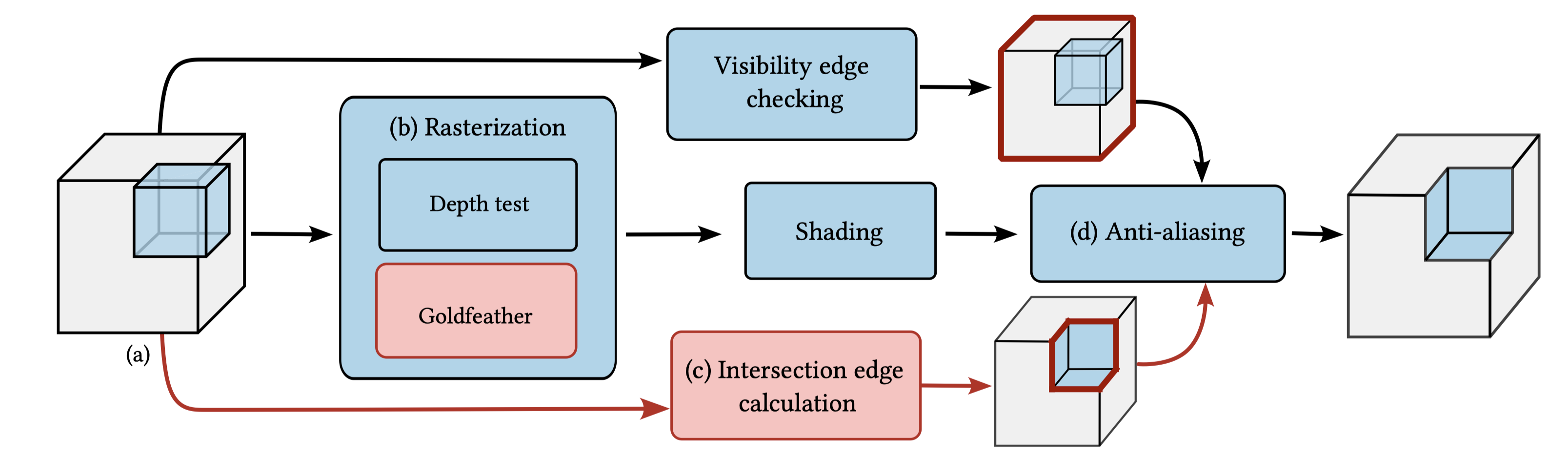
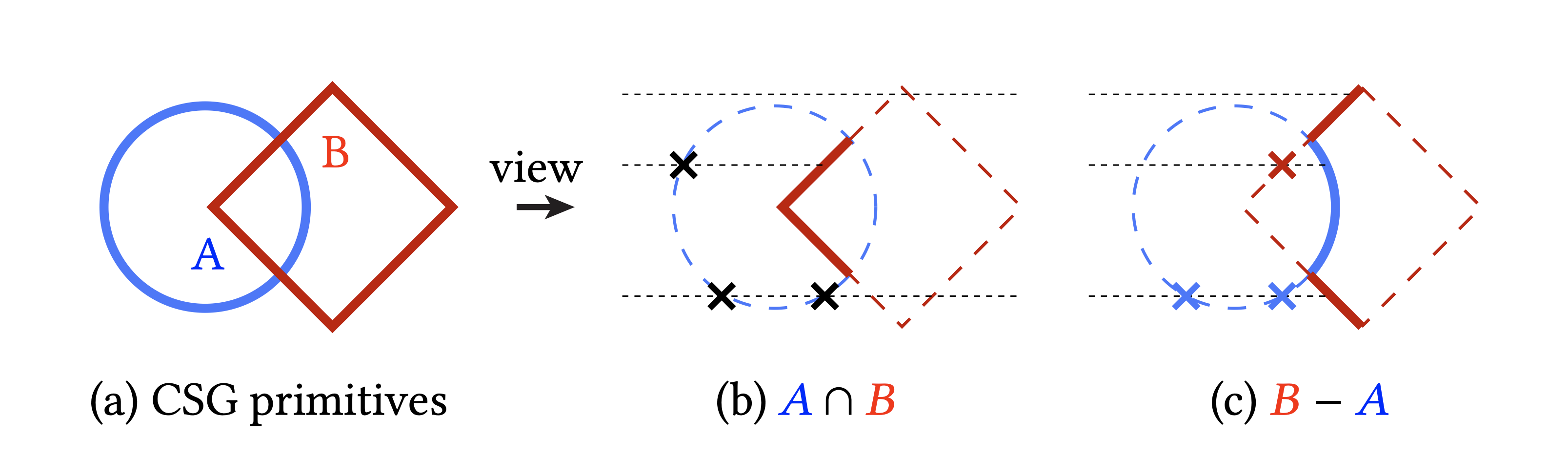
Our algorithm builds upon CSG rasterization, which displays the result of boolean operations between primitives without explicitly
computing the resulting mesh and, as such,
bypasses black-box mesh processing.
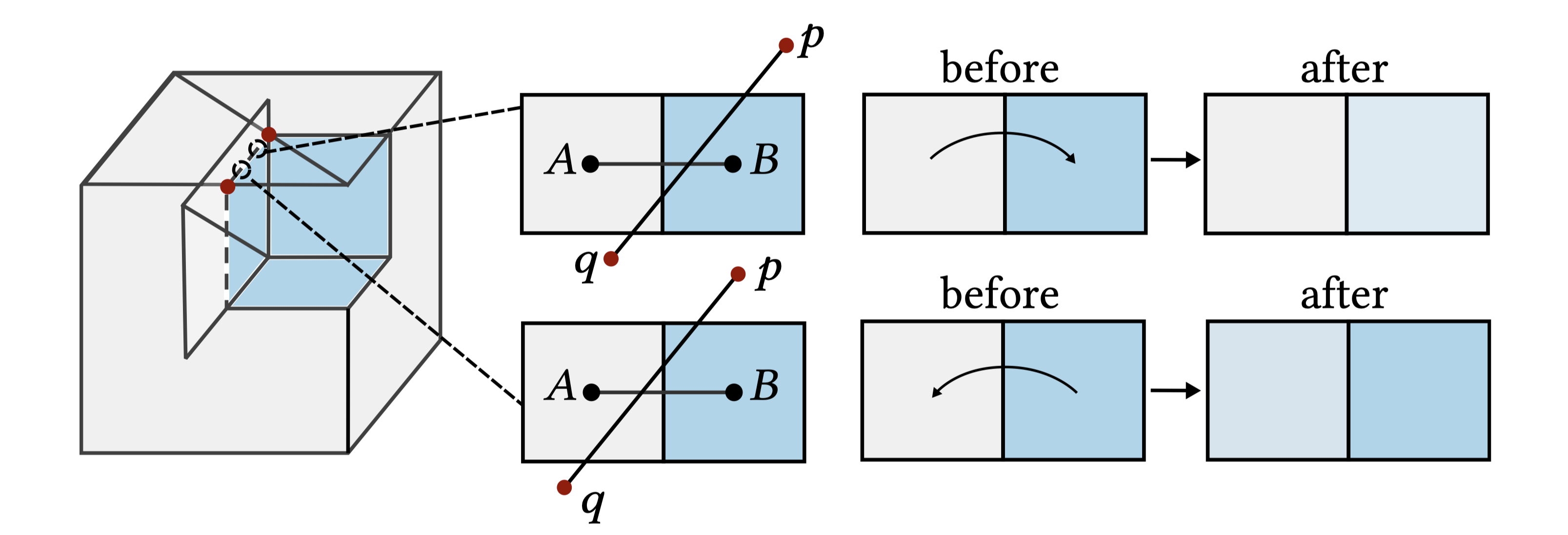
We describe how to implement CSG rasterization within a differentiable rendering pipeline, taking special care to apply antialiasing
along primitive intersections to obtain gradients in such critical areas. Our algorithm is simple and fast, can be easily incorporated
into modern machine learning setups, and enables a range of applications for computer-aided design, including direct and image-based editing of CSG primitives.